doi: 10.1142/9789812797698_0021 issn: 1793-0839
The December 1997 World Scientific paper:
Behavior-Based Cooperative Robotics Applied to Multi-Target Observation
Lynne E. Parker [Oak Ridge National Laboratory]
copied approximately 99% of the earlier April 1997 IEEE copyright paper:
Cooperative multi-robot observation of multiple moving targets
Lynne E. Parker and Brad Emmons
https://doi.org/10.1109/ROBOT.1997.619270
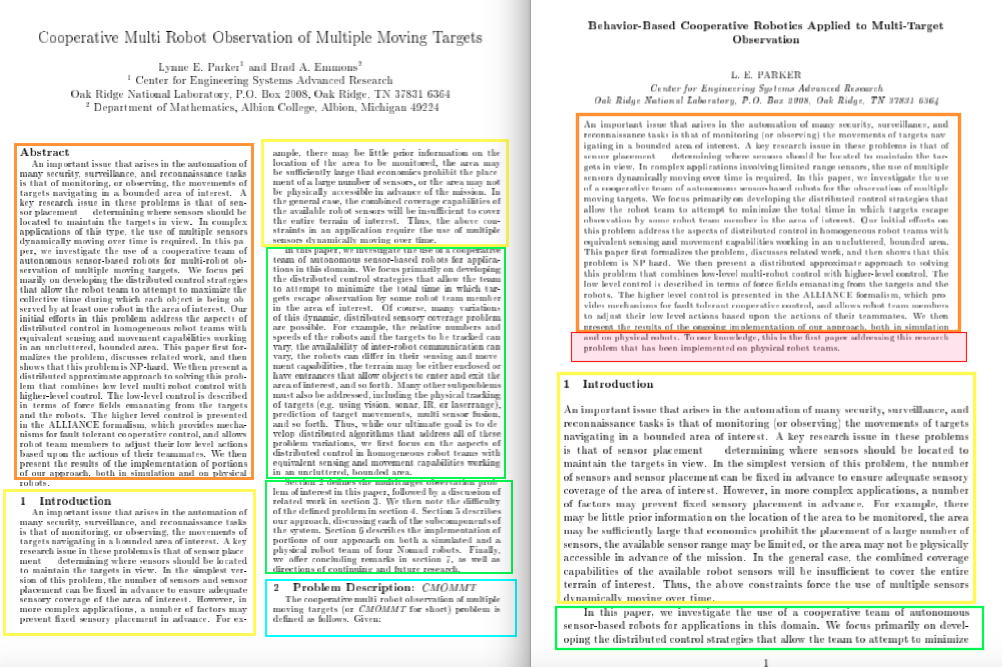
The single-author 1997 World Scientific version did not enclose copied passages in quotation marks, did not cite the original IEEE version, and did not indicate permission of the copyright holder, thereby taking credit for the words and ideas of original co-author Emmons.
According to World Scientific:
Reproducing text from other papers without properly crediting the source (plagiarism) or producing many papers with almost the same content by the same authors (self-plagiarism) is not acceptable.
The abstract of the single-author World Scientific version makes the following false/misleading statement:
To our knowledge, this is the first paper addressing this research problem that has been implemented on physical robot teams.
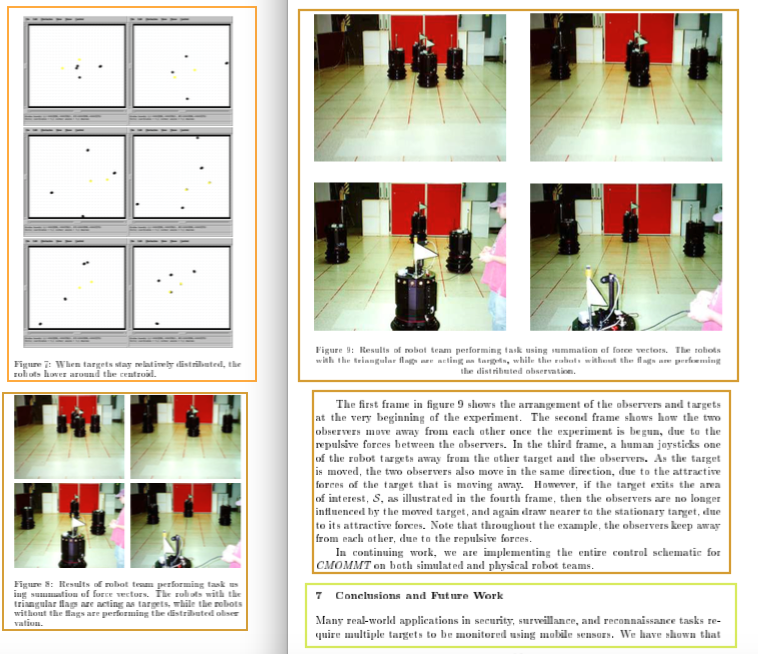
Both versions of the work contain the same photographs of a physical robot team on which the method had been implemented. It is clear that author Parker knows of the earlier IEEE paper, which Parker's vitae lists along with the World Scientific paper.
The work was funded by the public via Lockheed Martin contract DE-AC05-96OR22464 with the U.S. Department of Energy.
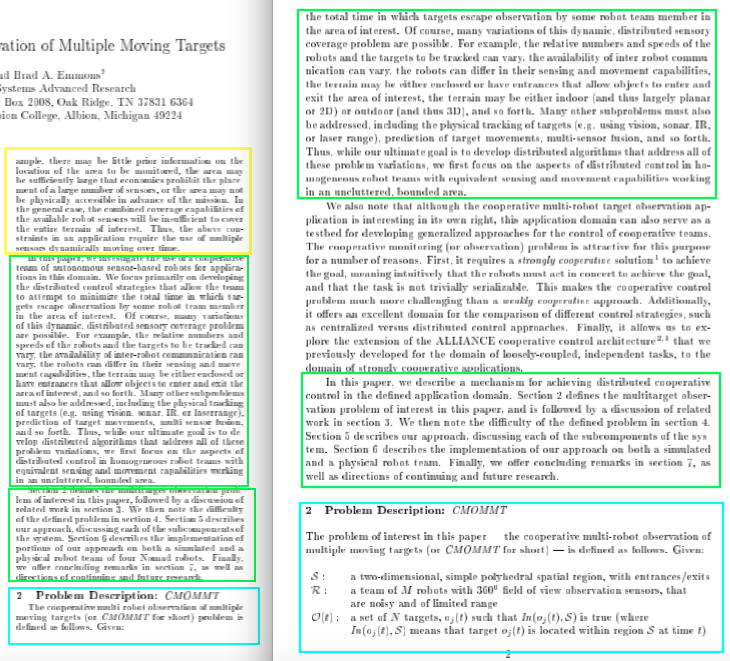
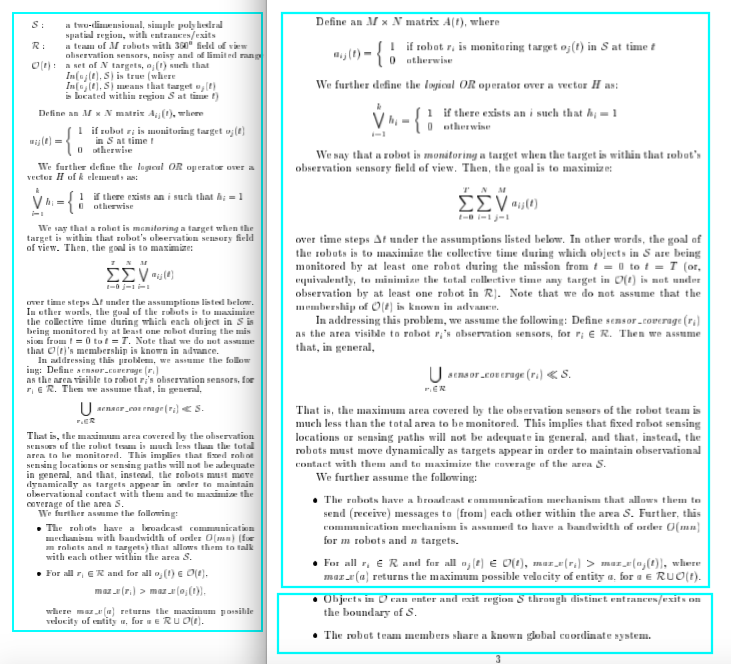
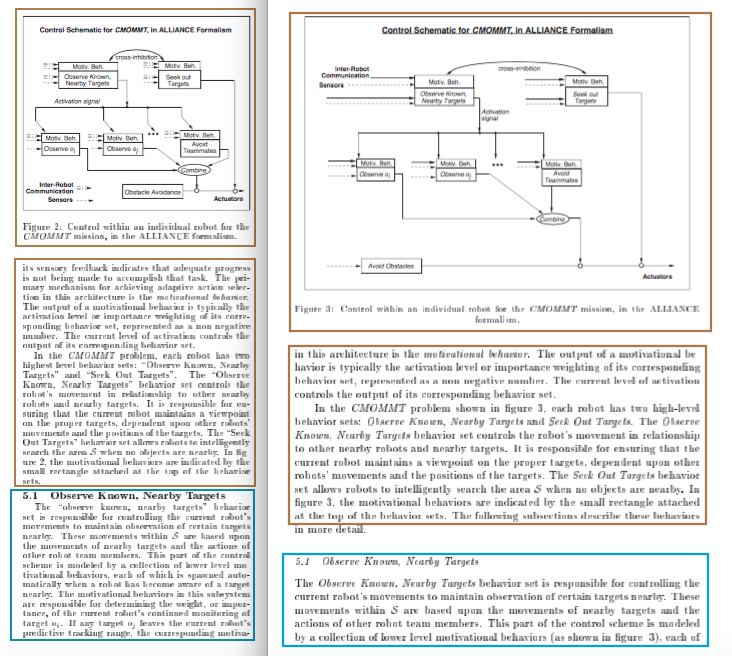
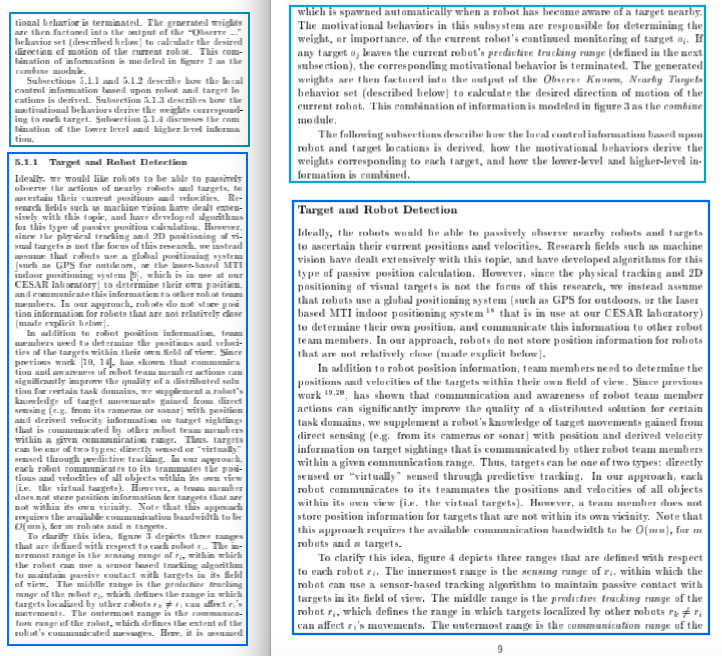
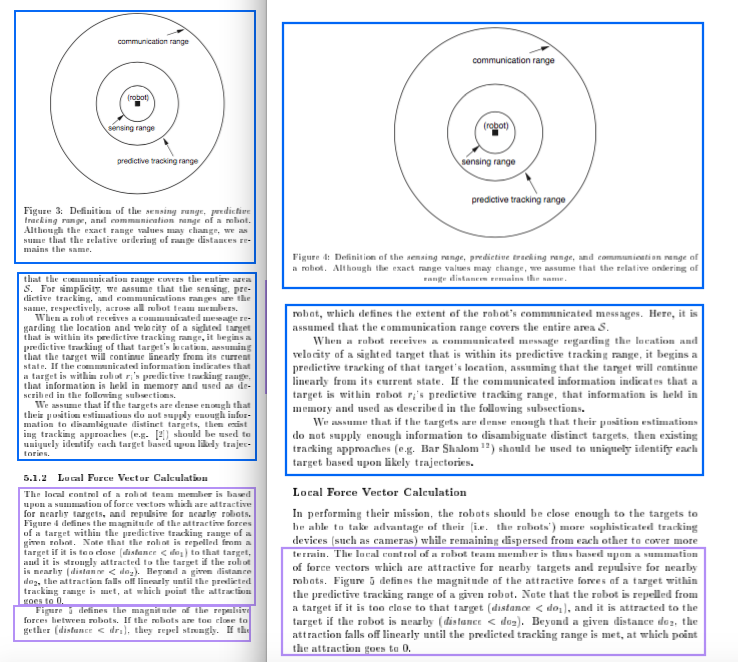
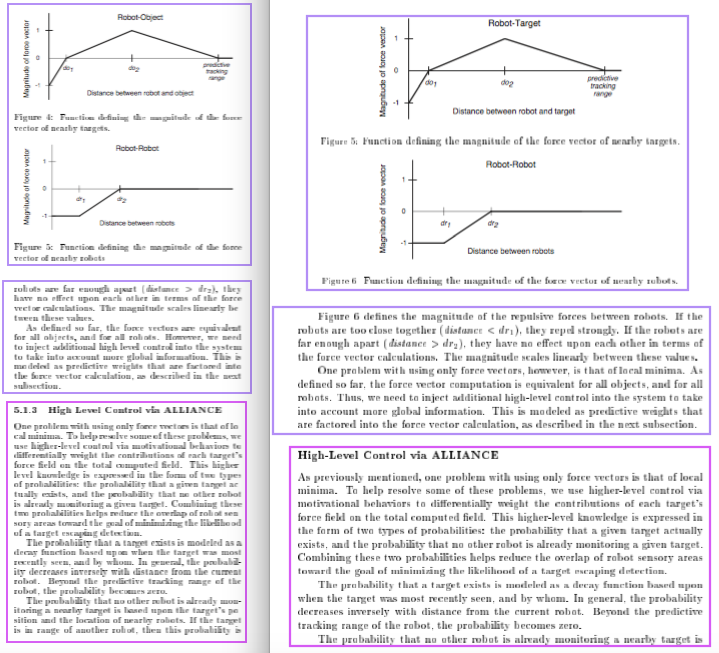
Examples are shown below, with the IEEE version on the left.
Attach files by dragging & dropping,
selecting them, or pasting
from the clipboard.
![]() Uploading your files…
We don’t support that file type.
with
a PNG, GIF, or JPG.
Yowza, that’s a big file.
with
a file smaller than 1MB.
This file is empty.
with
a file that’s not empty.
Something went really wrong, and we can’t process that file.
Uploading your files…
We don’t support that file type.
with
a PNG, GIF, or JPG.
Yowza, that’s a big file.
with
a file smaller than 1MB.
This file is empty.
with
a file that’s not empty.
Something went really wrong, and we can’t process that file.